Research Summary Report of B04
Process Control and Adaptive Path Planning for Additive Manufacturing Processes Based on Industrial Robots with an Extended Degree of Freedom
[09.08.2024]
Ekanayaka, Virama; Doctoral researcher, v.ekanayaka@tu-braunschweig.de, TU Braunschweig, Institute of Machine Tools and Production Technology (IWF)
Hürkamp, André; Project Leader, a.huerkamp@tu-braunschweig.de, TU Braunschweig, Institute of Machine Tools and Production Technology (IWF)
The integration of robot-guided additive manufacturing in the construction industry increases the degree of automation and can thus lead to an increased productivity and increased component quality. In shotcrete 3D printing (SC3DP), reproducible manufacturing results and ensuring component quality are major challenges, as the properties of shotcrete depend on many different parameters (e.g. temperature, pressure, water-cement ratio, hardening accelerator). The goal of this research project is to develop a reproducible, robot-guided shotcrete process based on multi-model adaptive path planning for the production of large, high-quality and complex components.
Summary
To achieve precise fabrication of the desired geometry during the SC3DP process, it is necessary to employ effective process control. This involves gaining a thorough understanding of material-process interactions, which is essential for determining the optimal process parameters. These interactions impact the stability and shape of the printed structure and can be investigated using finite element simulations.
The traditional finite element method involves simulating a CAD model with appropriate boundary conditions to determine the resulting deformations and stresses. However, in 3D printing, the CAD model undergoes additional steps. Firstly, it is sectioned into vertical layers using a slicer, and path planning algorithms are applied to each layer. These algorithms determine the printing path and optimal process parameters, serving as input data for the 3D printer.
It is important to note that simulating the CAD model from the start of the process chain may not account for effects that arise during subsequent steps. To address this, a framework was developed within the B04 project to directly construct the simulated geometry from the process parameters and printing path, as depicted in Figure 1.
Furthermore, a time stamp derived from the nozzle velocity is assigned to each mesh element with which the time-dependent material properties of concrete can be implemented. The current research is focusing on two areas. Firstly, the research is exploring the integration of machine learning approaches directly into the solver to reduce the computational expense of finite element simulations. At the same time, there is ongoing research into simulating printed objects with graded materials.
Current state of research
The simulations utilized the Drucker-Prager material model, incorporating the time-dependent properties of concrete as explicit functions. There are two forms of structural instability: elastic buckling and plastic deformations. In Figure 2, the build-up of a cylinder is depicted, where the primary form of instability observed was elastic buckling.
The lower layers curve outwards, causing the upper section to fall inwards. This is a classic example of elastic buckling, where the structure’s geometry results in instability. Such instabilities can be avoided by selecting appropriate waiting times to allow for hardening. An optimal distribution of these waiting times was determined using simulations.
In the material modeling stage of the simulation, a physics-informed neural network was used to calculate the plastic multiplier. Typically, the plastic multiplier is determined by solving the consistency equation

within a Newton-Raphson loop. However, the neural network allows for a direct computation, eliminating the need for the iterative process. The results closely matched the numerically obtained values, which allowed the iterative process of the material model to be replaced by the neural network. Current research is exploring the use of physics-informed neural networks to solve the equilibrium equation.

The main challenge in this area is the varying size of vectors due to the addition of new layers.
References
[1] Harbig, D. L. Wenzler, S. Baehr, M. K. Kick, H. Merschroth, A. Wimmer, M. Weigold, M. F. Zaeh, “Methodology to Determine Melt Pool Anomalies in Powder Bed Fusion of Metals Using a Laser Beam by Means of Process Monitoring and Sensor Data Fusion,” Materials, vol. 15, no. 3, 2022, doi: 10.3390/ma15031265
[2] L. Wenzler, D. Rauner, H. Panzer, T. Mair, L. Kutscherauer, A. Wimmer, D. Wolf, S. Baehr, M. F. Zaeh, “reAM250 — an open-source research platform for process monitoring and control in powder bed fusion of metals using a laser beam,” 13th CIRP Conference on Photonic Technologies, in Procedia CIRP, 2024
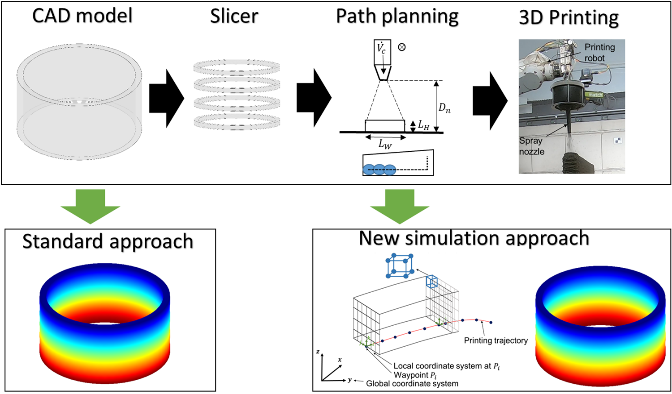
Fig 1: Path and process-based simulation approach / Credit: IWF
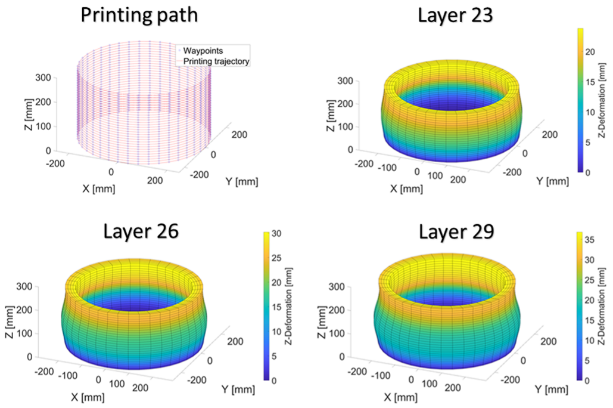
Fig 2: Elastic buckling during build-up of cylinder / Credit: IWF



