Project B 05
![]()




Networking with other projects
Poster
TRR277_B05_Poster_1-DFG-Begutachtung
TRR277_B05_Poster_2-DFG-Begutachtung
Principles of Mobile Robotics for Additive Manufacturing in Construction
This research examines the architectural implications of mobile robotics for AM in construction and develops methods for their implementation. The material deposition method of clay and concrete extrusion is used to investigate AM strategies for mobile robots. By implementing advanced sensor and control solutions, autonomous localization and precise manipulation techniques for mobile AM are explored with the aim of manufacturing large building components whose size exceeds the robot’s static workspace. Additionally, this research aims to provide scalability to AM processes by examining the use of multiple robots to cooperate on individual manufacturing jobs.
Objective
The main objective of this research is the conception and development of building-scale AM technology using mobile robots to study various architectural application scenarios. While current systems for in situ AM are often single stationary large-scale facilities, AM using mobile robots could offer a less constrained workspace and thus new architectural possibilities. They could offer scalability through collaboration and parallelization of both mobile multi-robot systems and human-robot teams. Finally, their flexibility in deployment could extend the scope of in situ AM from new construction to constructions within existing contexts.
Approach
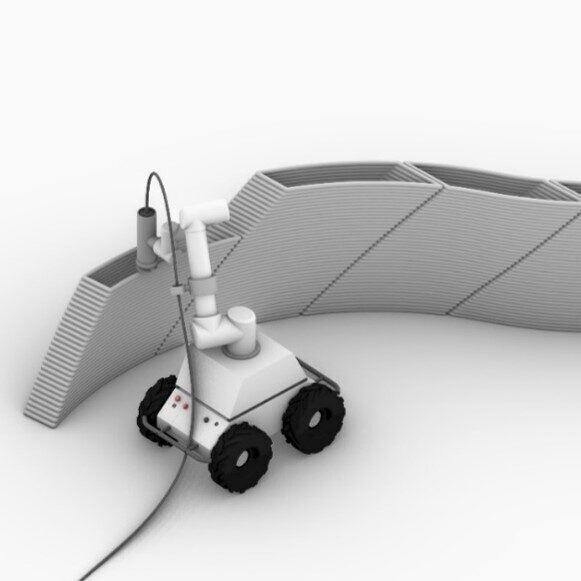
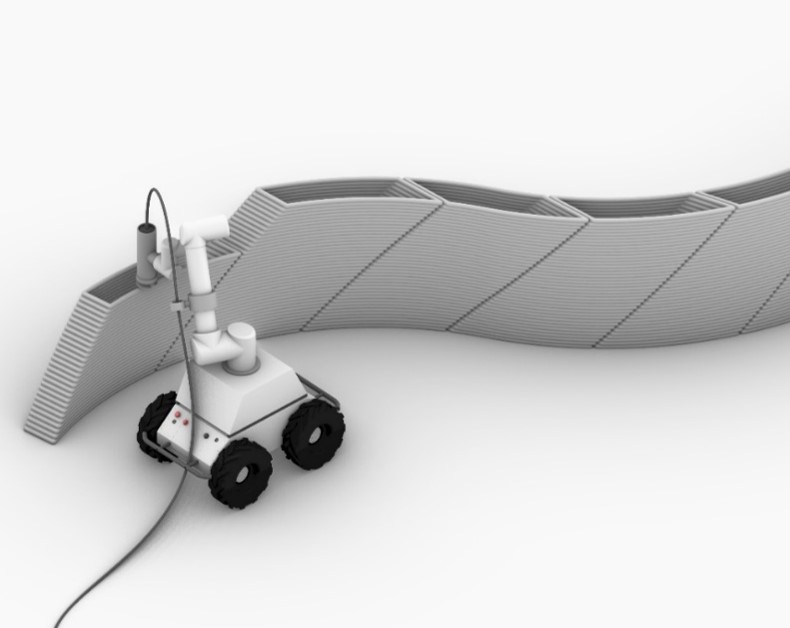
To carry out this research, two mobile platforms are designed and set up to be capable of omni-directional ground-based movements with four steerable wheels and material extrusion heights of 2.5 m with a 6DOF robotic manipulator on a vertical linear axis. The mobile systems can further be equipped with either an onboard clay or tethered concrete extrusion 3D printing system, enabling the testing and validation of the proposed principles and methods in a laboratory environment. With the two identical systems, planned is to perform experiments with both a stepwise print-drive-print (phase 1) and a continuous print-while-drive (phase 2) approach, with the aim of creating building-scale components using coordination of tasks and cooperative behaviour with cooperating machines and humans. In this scope, a two-step on-board localization and end-effector positioning method is proposed, where firstly the mobile platform is globally located in a world map and secondly the global localization is refined by referencing the robot locally, i.e., relative to the workpiece.
Networking with other projects
This research project is strongly linked to other research areas within the TRR 277: Firstly, to the concrete extrusion AM technology developed within the research project A03; secondly, to the integration of streamlined design-to-fabrication workflows developed in C04; thirdly, to the process control and online feedback mechanisms during fabrication for robots with extended degrees of freedom developed in B04, including methods for the robot’s localization on-site; and finally to the integration of AM in the construction process using mobile robots directly on building sites, which is investigated in the research project C06.
Project leaders

Dörfler, Kathrin Prof. Dr. sc. ETH
leads the scientific staff in the conception and execution of the research, and in questions of validation of the proposed methods. She is also responsible for the coordination of the cooperating research projects in the TRR 277. She is the Co-Spokesperson of the TRR 277. Dörfler supports Kloft as contact person for the DFG, in general public relation matters and also in representing the TRR 277 externally. Internally, Dörfler assists Kloft in the coordination between the research projects, as well as in the decisions on the financing of research tasks in the TRR 277.
Project(s)
Earth Additive Manufacturing (EAM) – Material and Process Combinations for AM with Earth-based Materials
Principles of Mobile Robotics for Additive Manufacturing in Construction
Learning, Sustainability, Design: Gender-equitable introduction of AMC to the public
Central Tasks of the AMC
Contributors

Dielemans, Gido M. Sc.
is a doctoral researcher at the TT Professorship for Digital Fabrication within TUM. With background in structural design and engineering, he will develop strategies for using mobile robotic systems performing extrusion-based AM on construction sites. Fundamentally, this work is interdisciplinary, and he therefore strives for a high degree of collaboration within, but not limited to, the TRR277.
Project(s)
Principles of Mobile Robotics for Additive Manufacturing in Construction
Central Tasks of the AMC

Fleckenstein, Julia Dipl. Ing.
is a doctoral researcher at the TT Professorship for Digital Fabrication at TUM with background in architecture. In her research, she explores site-specific digital design tools for robotically fabricated real-size mono-component building envelopes. As part of her association with the AMC, she is part of the interdisciplinary teaching team for the project “From Additive Manufacturing to Architectu…

Richter, David M. Sc.
David is a civil engineer with a passion for soft- and hardware development, digital manufacturing, and prototyping. He obtained his master’s degree in civil engineering from the Technical University of Munich (TUM), with a thesis focused on the investigation of printed carbon short fibre concrete under cyclic tensile stress. Prior to that, David studied philosophy and completed his bachelor’s deg…



