Focus Area B
The experimentally driven investigations of focus area A ‘Materials and Processes‘ are enhanced by the corresponding projects of focus area B ‘Computational Modelling and Control’. All AM processes will be developed by taking into account assigned digital feedback obtained by computational modelling and process control. The aim of focus area B is the development of novel models and efficient discretisation schemes for numerical simulation of material–process interactions relevant to additive manufacturing processes in construction. From the modelling point of view, the focus is on the rheological behaviour of concrete during extrusion (B02, B03) and on the thermo-mechanical behaviour of steel during selective laser melting (B01). On the computational side, a suite of discretisation procedures will be developed, including DEM, FEM, and Lattice Boltzmann methods. Additionally, the coupling of multiple discretisation techniques will be required due to the complexity of the described phenomena.
During the first funding period, primarily A projects A03, A04 and A07, for which sufficient information about the material behaviour is available from preliminary research, will be supported with modelling and simulations (B01-B03). In the course of the second funding period, the area of computational modelling will be expanded to all A projects. Furthermore, a special focus will be on process control and path planning for the robot-assisted AM techniques. Therefore, project B04 is tied to the robotic manufacturing methods of projects A04 and A05. Project B 05 is related to project A03. Kathrin Dörfler, freshly appointed professor for Digital Fabrication at TU Munich, will focus on the integration of mobile robots in the extrusion-based AM process of A03 by investigating the principles of mobile robotics for AM and the potential opportunities that these processes can bring to on-site construction.
![]()
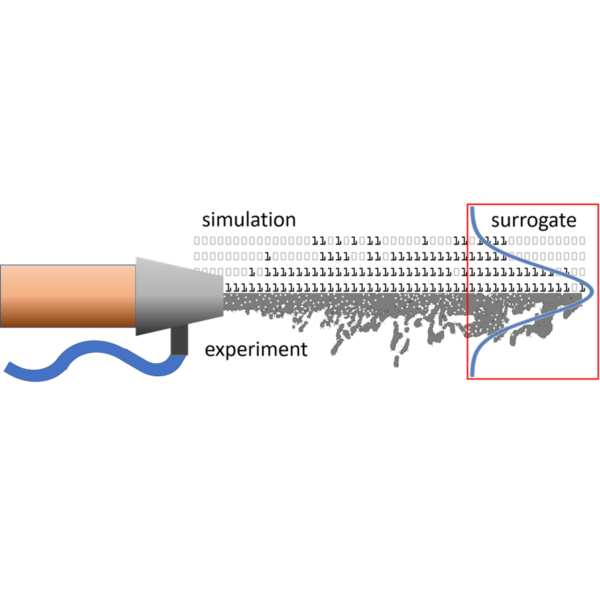
Taylor-Couette simulation of Bingham Fluid Phase-field simulation of falling droplet Granular Particle Image velocimetry of jet Phase-field simulation of jet Networking with other projects Poster TRR2…
Geier, Martin Junior Prof. Dr. rer. nat.
He substantially contributes to model development and implementation related aspects of WPs 1-2 and will contribute to the analysis of simulation results with special focus on WP 5.
Project(s)
Modelling and Simulation of Shotcrete 3D Printing (SC3DP) Based on a Massively Parallel Multi-Phase, Multi-Component Coupled LBM-DEM Approach

Krafczyk, Manfred Prof. Dr.-Ing.
is responsible for WPs 3-5 and contributes to HPC and setup related aspects of the corresponding simulations. He advises Dr. Kutscher in conducting the simulations and the analysis of the results. He also takes responsibility for the data exchange with other projects within the TRR.
Project(s)
Modelling and Simulation of Shotcrete 3D Printing (SC3DP) Based on a Massively Parallel Multi-Phase, Multi-Component Coupled LBM-DEM Approach

Kutscher, Konstantin Dr.-Ing.
is the lead developer of the VirtualFluids software. In this function he is indispensable for the project as a new doc. res. could not possibly extend the existing framework (>700,000 lines of code) with the new models to be developed and adapted in WP 1-4. He is also experienced in conducting massively parallel runs on THIER-0 systems and analyzing huge data sets with more than 10 degrees of free…
Project(s)
Modelling and Simulation of Shotcrete 3D Printing (SC3DP) Based on a Massively Parallel Multi-Phase, Multi-Component Coupled LBM-DEM Approach
![]()
Project Scope Website Path Planning Sensorization Networking with other projects Poster TRR277_B04_Poster_1-DFG-BegutachtungTRR277_B04_Poster_2-DFG-Begutachtung Process Control and Adaptive Path Plann…

Hürkamp, André Dr.-Ing.
is junior research group leader at the IWF. Together with Prof. Raatz, he is responsible for the proposed project and its coordination within the TRR 277. He guides the IWF-staff related to the project and decide about research actions in terms of numerical investigations and model reduction.
Project(s)
Process Control and Adaptive Path Planning for Additive Manufacturing Processes Based on Industrial Robots with an Extended Degree of Freedom

Raatz, Annika Prof. Dr.-Ing.
she is responsible for the scientific management and coordination of project B04. In addition to supervising the content of the research assistant, she supports the coordination of the work and represents the project internally and externally as head of the institute.
Project(s)
Process Control and Adaptive Path Planning for Additive Manufacturing Processes Based on Industrial Robots with an Extended Degree of Freedom

Akica, Ilknur M. Sc.
is a researcher at the Institute for Machine Tools and Production Technology (IWF) at TU Braunschweig. She will be responsible for developing finite element models for use in additive manufacturing. This includes simulation of the process, investigation of the material models, and ensuring component stability. She further analyzes all data, prepares reports, presentations and publications.
Project(s)
Process Control and Adaptive Path Planning for Additive Manufacturing Processes Based on Industrial Robots with an Extended Degree of Freedom

Ekanayaka, Virama M. Sc.
is a doctoral researcher at the IWF. He will be developing finite element models to be used in additive manufacturing. He will lead the implementation of mathematical approaches for model order reduction and work on system sensorization. He will frequently publish the results achieved within the community.
Project(s)
Process Control and Adaptive Path Planning for Additive Manufacturing Processes Based on Industrial Robots with an Extended Degree of Freedom

Heeren, Hauke M. Sc.
is a doctoral researcher at the Institute for Assembly Technology and Robotics within Leibniz University Hannover. His background in mechatronics and robotics drives his work on mobile robotics. By synergizing elements from computer science, control theory, and mechanical design he enhances robotic autonomy and efficiency to enable print-while-driving
Project(s)
Process Control and Adaptive Path Planning for Additive Manufacturing Processes Based on Industrial Robots with an Extended Degree of Freedom

Mojaddarasil, Mohammad M. Sc.
is a doctoral researcher at the Institute for Machine Tools and Production Technology (IWF) at TU Braunschweig. He will support developing finite element models for use in additive manufacturing. This includes supporting the simulation of the process and investigation of the effect of material modelling. He further analyzes all data, prepares reports, presentations, and publications.
Project(s)
Process Control and Adaptive Path Planning for Additive Manufacturing Processes Based on Industrial Robots with an Extended Degree of Freedom
![]()
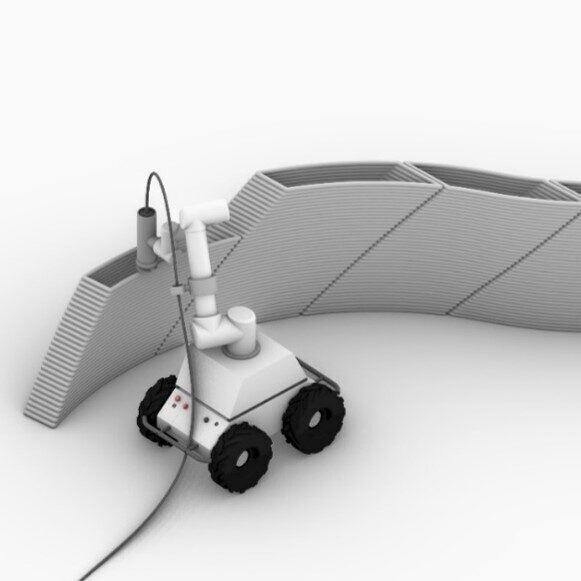
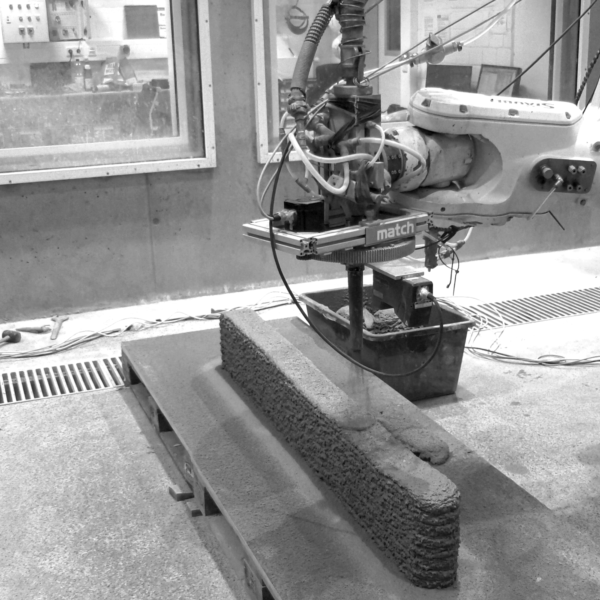
Figure 1: Mobile part-based AM: Fabrication scenario of a stay-in-place formwork carried out by a mobile robot. Figure 2: Two mobile robotic systems; left system is equipped with clay extrusion setup….

Dörfler, Kathrin Prof. Dr. sc. ETH
leads the scientific staff in the conception and execution of the research, and in questions of validation of the proposed methods. She is also responsible for the coordination of the cooperating research projects in the TRR 277. She is the Co-Spokesperson of the TRR 277. Dörfler supports Kloft as contact person for the DFG, in general public relation matters and also in representing the TRR 277 externally. Internally, Dörfler assists Kloft in the coordination between the research projects, as well as in the decisions on the financing of research tasks in the TRR 277.
Project(s)
Earth Additive Manufacturing (EAM) – Material and Process Combinations for AM with Earth-based Materials
Principles of Mobile Robotics for Additive Manufacturing in Construction
Learning, Sustainability, Design: Gender-equitable introduction of AMC to the public
Central Tasks of the AMC

Dielemans, Gido M. Sc.
is a doctoral researcher at the TT Professorship for Digital Fabrication within TUM. With background in structural design and engineering, he will develop strategies for using mobile robotic systems performing extrusion-based AM on construction sites. Fundamentally, this work is interdisciplinary, and he therefore strives for a high degree of collaboration within, but not limited to, the TRR277.
Project(s)
Principles of Mobile Robotics for Additive Manufacturing in Construction
Central Tasks of the AMC

Fleckenstein, Julia Dipl. Ing.
is a doctoral researcher at the TT Professorship for Digital Fabrication at TUM with background in architecture. In her research, she explores site-specific digital design tools for robotically fabricated real-size mono-component building envelopes. As part of her association with the AMC, she is part of the interdisciplinary teaching team for the project “From Additive Manufacturing to Architectu…

Richter, David M. Sc.
David is a civil engineer with a passion for soft- and hardware development, digital manufacturing, and prototyping. He obtained his master’s degree in civil engineering from the Technical University of Munich (TUM), with a thesis focused on the investigation of printed carbon short fibre concrete under cyclic tensile stress. Prior to that, David studied philosophy and completed his bachelor’s deg…
![]()
Networking with other projects Poster TRR277_B06_Poster_2-DFG-Begutachtung Material Modelling and Simulation of Deposition AM Processes on the Part Scale This project aims at providing a modell…

Jänicke, Ralf Prof. Dr.-Ing.
is Professor at the Institute of Applied Mechanics (IAM) –Technical University of Braunschweig . In his habilitation the focus is on computational homogenization and reduced order modelling of diffusion processes in fluid-saturated porous media.
Project(s)
Material Modelling and Simulation of Deposition AM Processes on the Part Scale

Kollmannsberger, Stefan PD. Dr.-Ing. habil.
is Professor at Bauhaus-University Weimar and is Head of the Chair of Data Science in Civil Engineering. He was head of the work group ‘Simulation in Applied Mechanics’ at the Chair of Computational Modeling and Simulation and has a fifteen year-long scientific record in that field. In this project, he is responsible for the development of simulation methods for metal based artefacts.
Project(s)
Material Modelling and Simulation of Deposition AM Processes on the Part Scale
Bridging Scales – From Geometric Part Details to Construction Elements

La, Quoc Tuan M. Sc.
is a doctoral researcher at TU Braunschweig. He is responsible for developing material model of concrete used in additive manufacturing. His doctoral research also focuses on simulating the additive manufacturing deposition process on a part scale. Moreover, he will frequently publish the achieved results within the community.
Project(s)
Material Modelling and Simulation of Deposition AM Processes on the Part Scale



