Research summary report of C04
Integrating Digital Design and Additive Manufacturing through BIM-Based Decision Support and Digital Twin Methods
[27.03.2026]
Li, Chao; doctoral researcher, chao1.li@tum.de
Petzold, Frank; PL, petzold@tum.de
Technical University of Munich, TUM School of Engineering and Design, Chair of Architectural Informatics
The application of Additive Manufacturing (AM) technology requires careful consideration of AM methods’ boundary conditions. Determining suitable AM methods is critical during the early design stages since changes in design are costly when design becomes more mature. To this end, WP1 of sub-project C04 aims to develop a design decision support system (DDSS) that assists architects and engineers in choosing feasible AM methods for BIM-based design. To achieve this, a knowledge base is formalized, which consists of information on different AM methods and design rules. On top of that, the DDSS analyzes building components’ geometric features and functional properties to provide recommendations for suitable AM methods, as well as visualization for design adaptations.
Summary
How can we effectively evaluate the printability of a given geometry? Project C04-WP1 addresses this challenge through the lens of robotic kinematics. By integrating Fabrication Information Models (FIM) with task-oriented manipulability maps, geometric feasibility can be assessed with ease. Furthermore, for printable geometries, the system generates feedback regarding optimal orientation and positioning. This automation eliminates the need for manual repositioning, significantly enhancing the efficiency of the form-finding process during early design stages.
Robot’s capability plays a decisive role to the printability of building elements. To numerically evaluate if a certain robot is capable to accomplish the printing task, one needs to transform the waypoints into robot’s intrinsic manipulation space, verify the reachability while avoiding collisions, then opt for certain metrics to plan for the (optimal) motion and control. Such a pipeline is non-trivial but inevitably needs to be included into the early stages when forms can rapidly change. To address this, we provide a framework to assess geometry with considerations of robot kinematics and printing process constraints.
Precisely, constraints of nozzle orientation and robot’s workspace are unified in a manipulability map. It provides visualization of robot’s reach capability, as well as the input of base position optimization. Instead of manual reposition and reorientation of the building elements/robots, it is now possible to automate the process with efficiency, as the algorithm can provide feedback in few seconds. If the computation fails to converge, i.e., the geometry is beyond the robot’s kinematic capability, then design adaptations should be made accordingly.
Current state of research
In the current phase, we have strengthened the BIM-based robotic simulation tool (RoboBIM) to facilitate fabrication-aware design. Based on previous efforts that build up the skeleton enabling BIM-based robotic simulation, now we have included task-oriented manipulability analysis and base optimization.
The robot’s workspace is divided into a 3D grid with high resolution. Within each grid cell, we sample various possible robotic poses required for the printing tasks incorporating the process constraints of the end effector. Using this data, manipulability maps are pre-computed. Finally, a search algorithm is applied to automatically optimize the position and orientation of the building element—or, conversely, the initial setup of the robot itself.
The pipeline tackles the challenge of validating geometry printability and will be used to collaborate with selected projects as proof-of-concept.
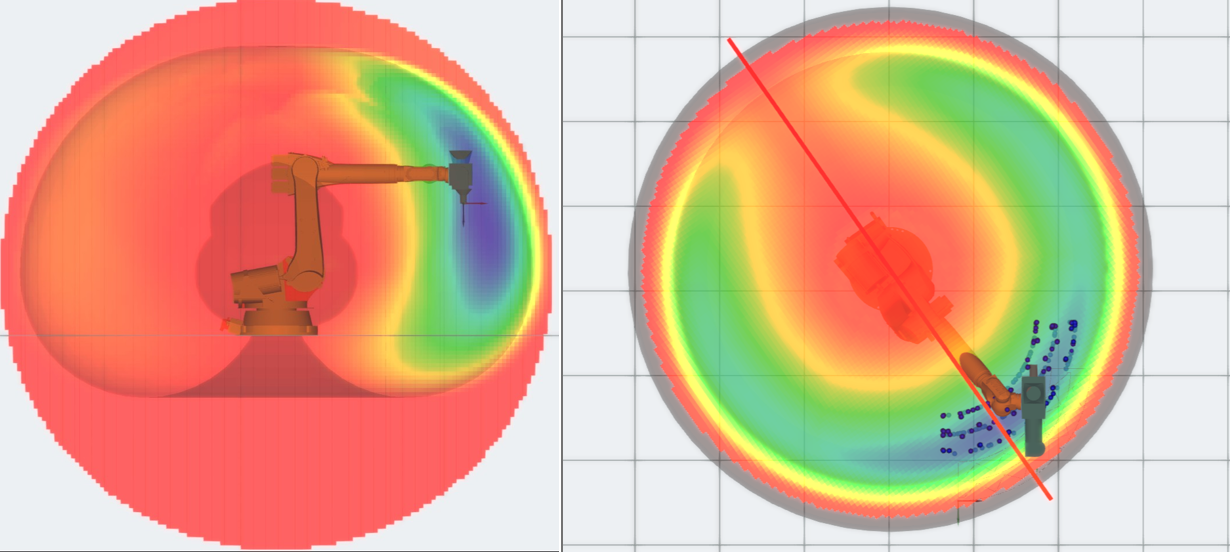
Figure 1: Penalized manipulability map of a robot with constrained printing direction; Blue: high manipulability, red: poor manipulability; blue dots in the top view: sampled targets located close to region with high manipulability / Credit: Li, AI, TUM



