Research summary report of B05
Principles of Mobile Robotics for Additive Manufacturing in Construction
[20.02.2026]
David Richter; PhD Researcher, david.richter@tum.de
Gido Dielemans; PhD Researcher, gido.dielemans@tum.de
Technical University of Munich, Professorship of Digital Fabrication
Summary
Project B05 investigates additive manufacturing in construction using mobile robotic systems on building sites. By combining the mobility of a robotic base with the dexterity of a manipulator, the project extends fabrication beyond the geometric reach and situational constraints of stationary system. It aims to develop transferable methods with relevance for the in-situ fabrication of large-scale components as well as for future renovation and repair applications. The project focuses on fundamental methods that allow architectural-scale components to be fabricated directly on site, including in confined or existing environments where large gantry systems are not applicable.
A central motivation of B05 is that construction environments are inherently spatially constrained, obstacle-rich, and shaped by existing structures. While mobility increases the reachable workspace, it also substantially increases the complexity of generating feasible and precise robot trajectories for in-situ 3D printing of building components in their final location. The core research contribution of B05 therefore lies in advancing motion planning for mobile manipulators operating in confined spaces. The project develops fabrication-aware planning strategies that coordinate the coupled degrees of freedom of the mobile platform and robotic arm, enabling continuous, collision-free toolpaths that satisfy process constraints, geometric tolerances, and material behaviour. This includes methods for redundancy resolution, adaptive base positioning, and the structuring of fabrication sequences into executable motion units, evolving from segmented print–drive–print approaches toward integrated printing-while driving strategies that enable uninterrupted material deposition under spatial constraints.
In recent work, we have demonstrated and validated this integrated planning framework through the in-situ fabrication of a self-supported vaulted ceiling using extrusion-based 3D concrete printing. The vaulted geometry provides a structurally demanding and fabrication-relevant test case, while the existing support beams create a spatially constrained, obstacle-rich environment characteristic of real construction sites.
The limited clearance, overhead obstructions, and restricted repositioning space require coordinated planning of base placement and manipulator trajectories to ensure collision-free execution and geometric precision during material deposition. Within this setting, fabrication was implemented using a segmented print–drive–print strategy, in which printing phases are executed from discrete base positions and connected through planned relocation manoeuvres. This scenario serves as a rigorous validation environment for our collision-aware and redundancy-resolving motion planning framework under realistic spatial constraints (Figure 1). At the same time, it establishes the methodological foundation for advancing toward more tightly integrated printing-while-driving strategies in future work.
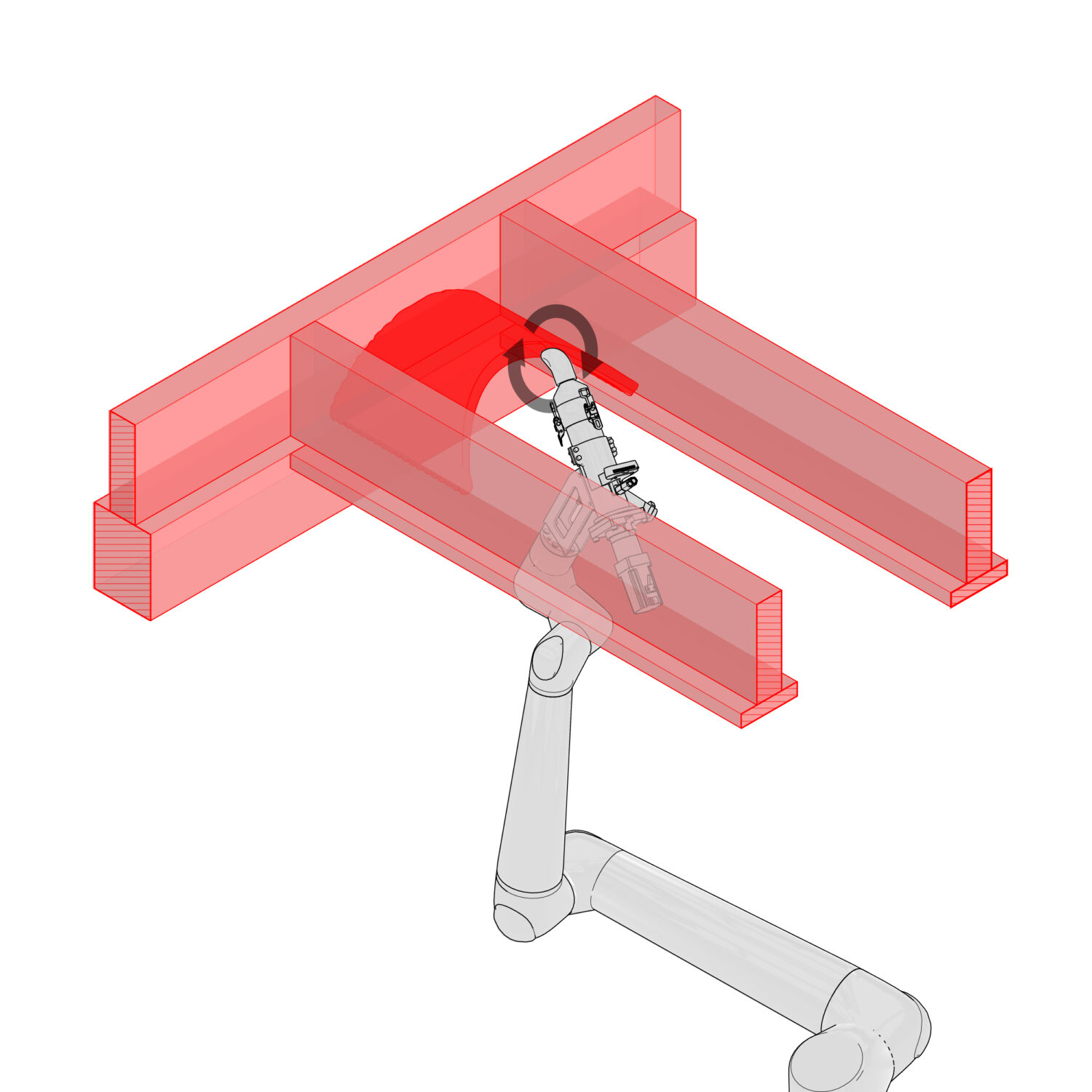
Figure 1: Visualization of the redundant degree of freedom on the end effector. The rotation around the central axis does not affect the printing outcome and can therefore be used to avoid collisions between the robot arm and the supporting beams (red).



