Research Summary Report B04
Process Control and Adaptive Path Planning for Additive Manufacturing Processes Based on Industrial Robots with an Extended Degree of Freedom
[06.05.2022]
Ekanayaka, Virama; Doctoral researcher, v.ekanayaka@tu-braunschweig.de
TU Braunschweig, Institute of Machine Tools and Production Technology (IWF)
Hürkamp, André; Project Leader, a.huerkamp@tu-braunschweig.de
TU Braunschweig, Institute of Machine Tools and Production Technology (IWF)
The integration of robot-guided additive manufacturing in the construction industry increases the degree of automation and can thus lead to an increased productivity and increased component quality. In shotcrete 3D printing (SC3DP), reproducible manufacturing results and ensuring component qualities are a major challenge, as the properties of shotcrete depend on many different parameters (e.g. temperature, pressure, water-cement ratio, hardening accelerator). The goal of this research project is to develop a reproducible, robot-guided shotcrete process based on multi-model adaptive path planning for the production of large, high-quality and complex components.
Summary
In order to minimize discrepancies between the printed structure and the target geometry, a successful process control should be implemented during the SC3DP process. In addition to adjusting material parameters by varying the mixture composition, process parameters such as nozzle speed can be regulated directly during the printing process in order to achieve the desired structural properties. A first step in implementing an efficient control of the SC3DP is to simulate the printing process to better understand the complex material-process interactions. The predicted deformations obtained through simulations form the basis on which an offline control can be achieved by suitable adjustment of the process settings.
Within the framework of the research project B04, a novel process-based simulation utilizing the finite element method (FEM) has been developed. In order to better capture the geometry resulting from the printing process, the simulated geometry is created directly from the printing trajectory and process parameters, as opposed to using a target CAD geometry, which is the standard practice in commercial FEM software. Furthermore, this simulation approach enables an efficient encoding of the time-dependent material properties of fresh concrete into the FEM mesh. Initial comparisons indicate a very close agreement between simulation results and scan data, as can be seen in Fig 1.
In order to ensure that the FEM simulation closely represents the actual printing process, each element of the mesh is assigned an individual time stamp derived from the printing velocity, so that the corresponding time dependent material values can be calculated at each time step. This approach enables to better encapsulate the dynamic behavior of fresh concrete into the simulation.
Current state of research short
Utilizing this novel path-based FEM simulation, the influence of interlayer waiting times on the structural deformation has been investigated. An optimal distribution of the interlayer waiting times were determined using the response surface method and the corresponding results have been published.
The sliding of layers during the printing process that are not perpendicular to the base plate can also be successfully modeled and simulated as shown in Fig 2.
The Drucker-Prager material model is utilized and it can be seen in figure 3 that the flow of fresh concrete can be simulated, and possible tilting or other instabilities (e.g. buckling) can be predicted in the simulation.
A sensitivity analysis of the model parameters with respect to the structural deformation is currently being carried out.
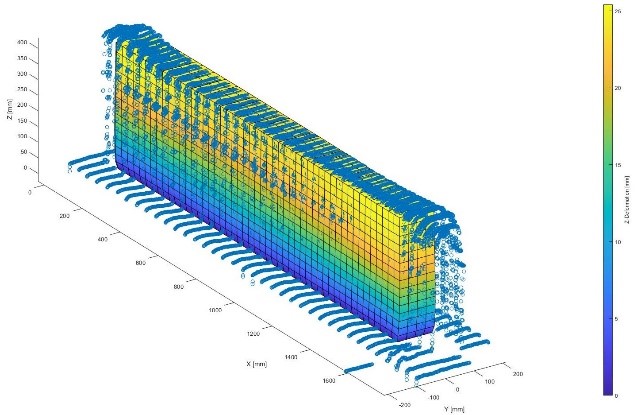
Fig 1: Comparison of simulation results with 3D scan data / Credit: IWF
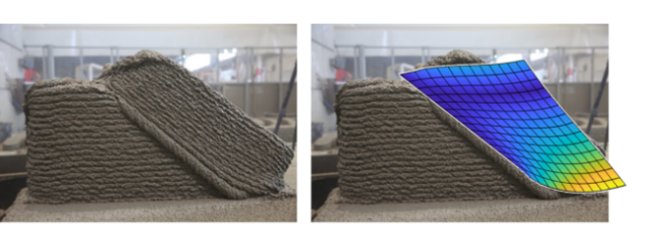
Fig 2: Calculated deformation of a sample on an inclined plane. / Credit: IWF
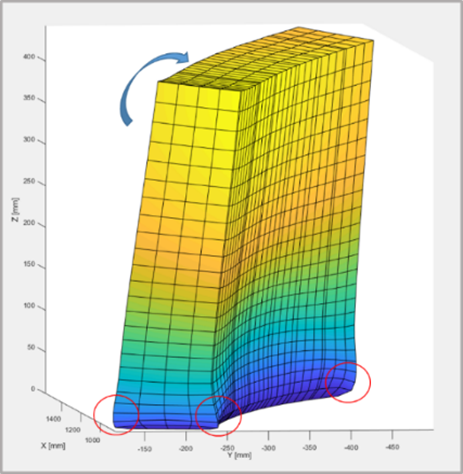
Fig 3: Calculated deformation of the specimen due to its own weight (deformation is exaggerated) / Credit: IWF



