Project B 04
![]()
Networking with other projects
![]()
Poster
TRR277_B04_Poster_1-DFG-Begutachtung
TRR277_B04_Poster_2-DFG-Begutachtung
Process Control and Adaptive Path Planning for Additive Manufacturing Processes Based on Industrial Robots with an Extended Degree of Freedom
The integration of robot-guided Additive Manufacturing in construction will foster the degree of automation and can thus lead to increased productivity and improved component quality. In this project, a multi-criterion path planning is developed, based on an application process model that includes geometrical data and time-dependent physical material properties. Together with multimodal systems, a sensor-guided control for an adaptive online path planning will be implemented. Further, multimodal sensors and new control strategies are investigated to control cognitive and cooperative autonomous robot units with an extended degree of freedom.
Aim
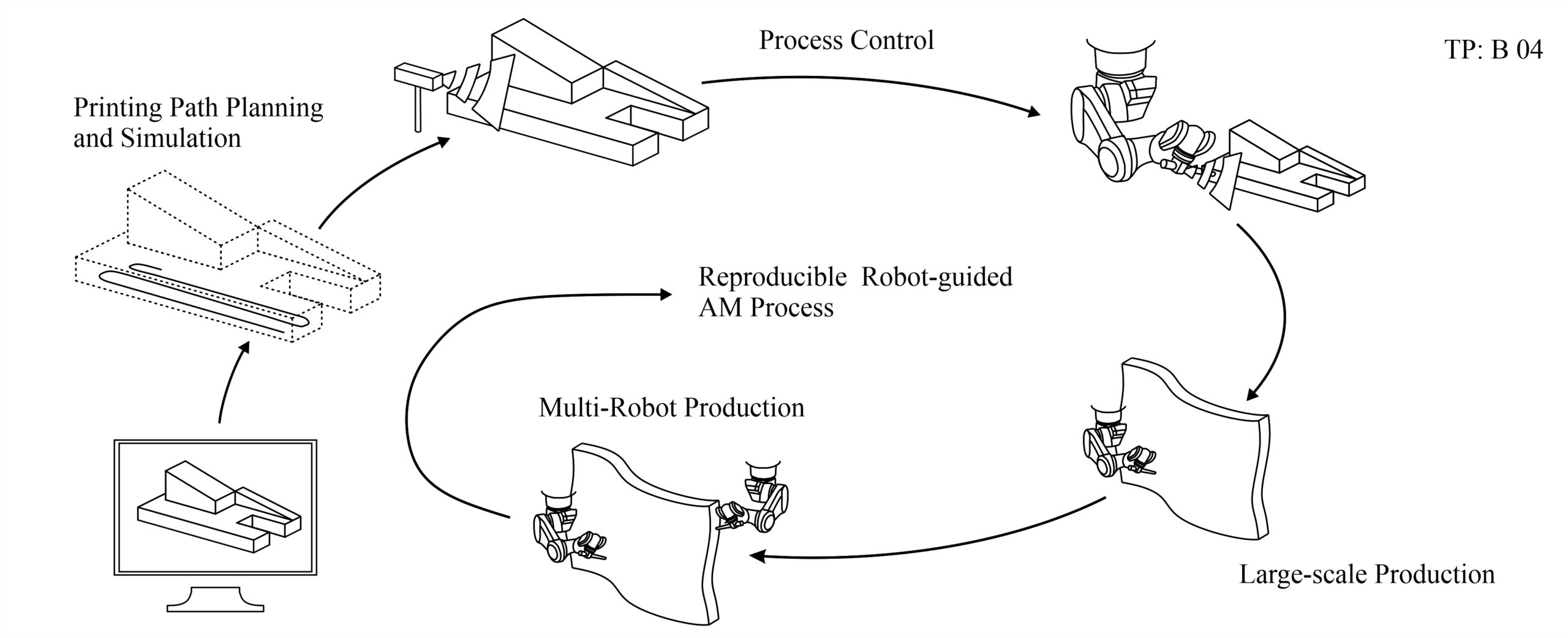
The aim of this research project is to develop a reproducible robot-guided additive manufacturing process based on multi model adaptive path planning and process control for the production of high-quality, large and complex concrete components.
Approach
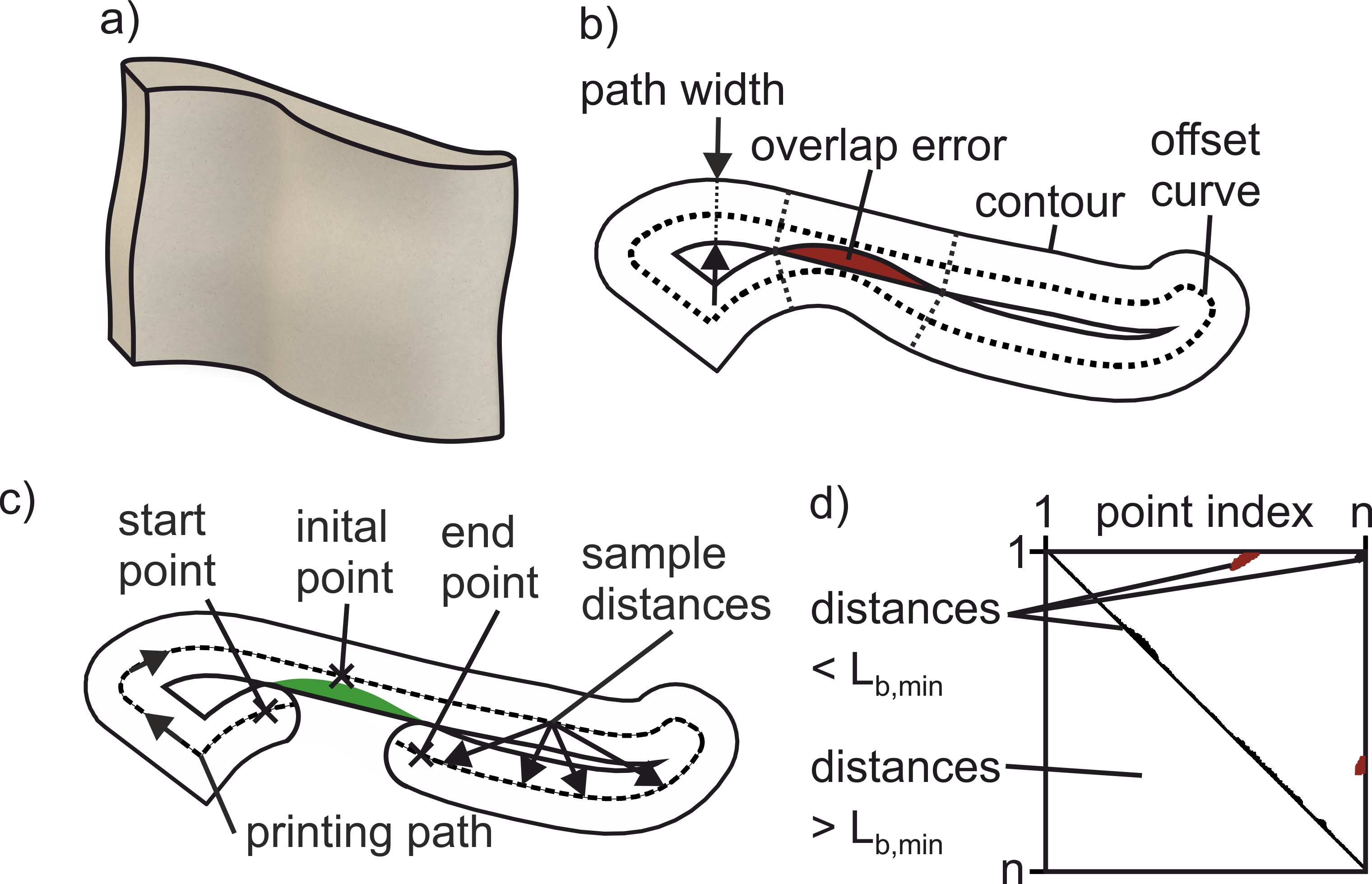
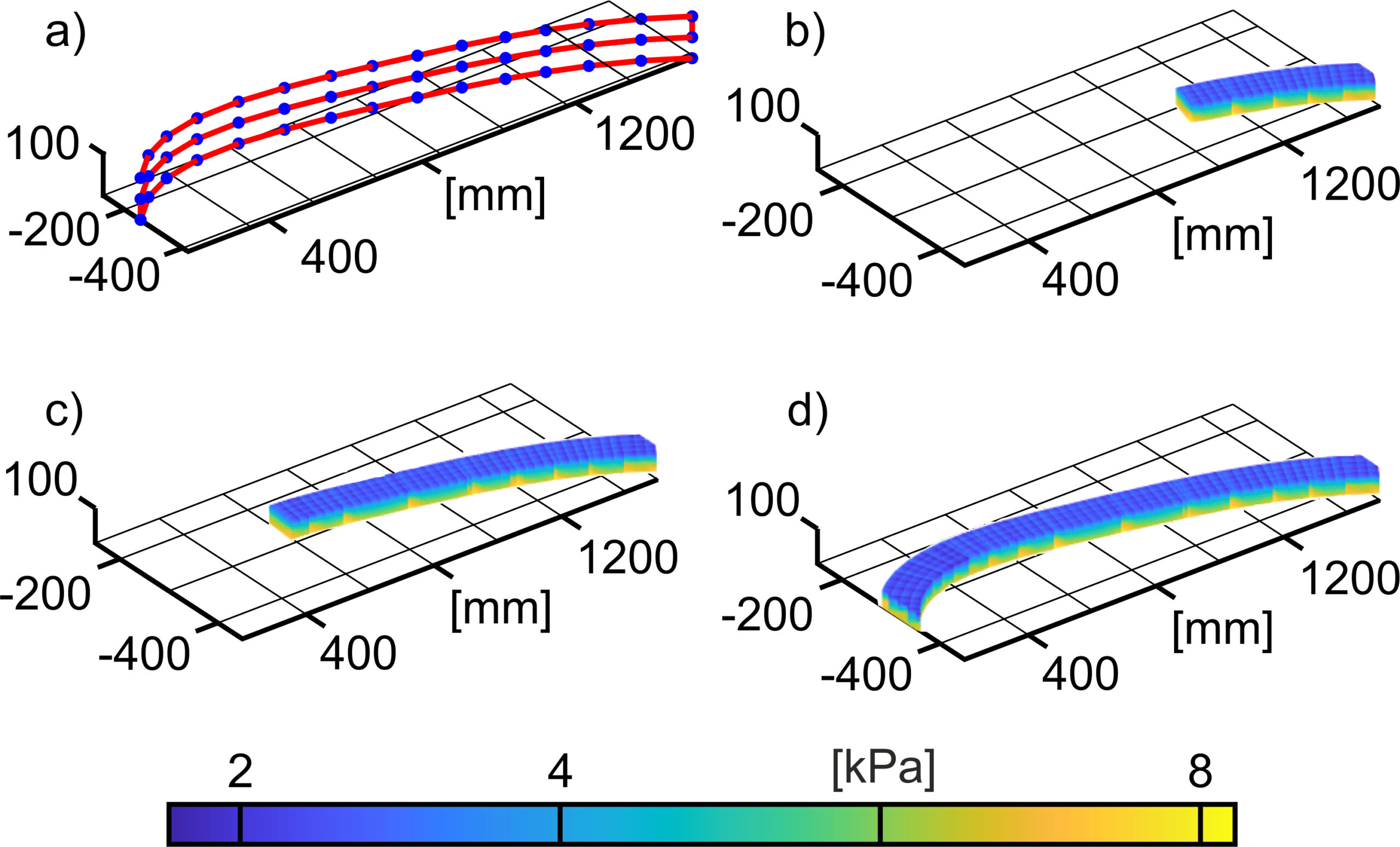
Based on physical modelling of the material behaviour, the numerical analysis of the printing process with respect to varying process conditions allows for a priori printing stability evaluation. Based on the simulated deformations, printing path optimization becomes possible and results in ensured component stability throughout the component production. In combination with advanced online control strategies and a sensing production system, large components will be realized utilizing the SC3DP process.
Networking with other projects
This project researches the modelling, monitoring, control and path planning of shotcrete application with industrial robots for the TRR 277. Thereby, B04 also serves as the first point of contract for quastions concerning all matters of robot control for all other projects.
Project leaders

Hürkamp, André Dr.-Ing.
is junior research group leader at the IWF. Together with Prof. Raatz, he is responsible for the proposed project and its coordination within the TRR 277. He guides the IWF-staff related to the project and decide about research actions in terms of numerical investigations and model reduction.
Project(s)
Process Control and Adaptive Path Planning for Additive Manufacturing Processes Based on Industrial Robots with an Extended Degree of Freedom

Raatz, Annika Prof. Dr.-Ing.
she is responsible for the scientific management and coordination of project B04. In addition to supervising the content of the research assistant, she supports the coordination of the work and represents the project internally and externally as head of the institute.
Project(s)
Process Control and Adaptive Path Planning for Additive Manufacturing Processes Based on Industrial Robots with an Extended Degree of Freedom
Contributors

Akica, Ilknur M. Sc.
is a researcher at the Institute for Machine Tools and Production Technology (IWF) at TU Braunschweig. She will be responsible for developing finite element models for use in additive manufacturing. This includes simulation of the process, investigation of the material models, and ensuring component stability. She further analyzes all data, prepares reports, presentations and publications.
Project(s)
Process Control and Adaptive Path Planning for Additive Manufacturing Processes Based on Industrial Robots with an Extended Degree of Freedom

Ekanayaka, Virama M. Sc.
is a doctoral researcher at the IWF. He will be developing finite element models to be used in additive manufacturing. He will lead the implementation of mathematical approaches for model order reduction and work on system sensorization. He will frequently publish the results achieved within the community.
Project(s)
Process Control and Adaptive Path Planning for Additive Manufacturing Processes Based on Industrial Robots with an Extended Degree of Freedom

Heeren, Hauke M. Sc.
is a doctoral researcher at the Institute for Assembly Technology and Robotics within Leibniz University Hannover. His background in mechatronics and robotics drives his work on mobile robotics. By synergizing elements from computer science, control theory, and mechanical design he enhances robotic autonomy and efficiency to enable print-while-driving
Project(s)
Process Control and Adaptive Path Planning for Additive Manufacturing Processes Based on Industrial Robots with an Extended Degree of Freedom

Mojaddarasil, Mohammad M. Sc.
is a doctoral researcher at the Institute for Machine Tools and Production Technology (IWF) at TU Braunschweig. He will support developing finite element models for use in additive manufacturing. This includes supporting the simulation of the process and investigation of the effect of material modelling. He further analyzes all data, prepares reports, presentations, and publications.
Project(s)
Process Control and Adaptive Path Planning for Additive Manufacturing Processes Based on Industrial Robots with an Extended Degree of Freedom



