Research Summary Report of C04
Integrating Digital Design and Additive Manufacturing through BIM-Based Decision Support and Digital Twin Methods
[04.10.2024]
Borrmann, André Project leader, andre.borrmann@tum.de
Slepicka, Martin Researcher,martin.slepicka@tum.de
All: Technical University of Munich, Chair of Computational Modeling and Simulation
Additive Manufacturing (AM) is gaining more and more interest in the construction sector as it potentially offers many advantages, such as increased geometric freedom and productivity. However, these advantages come at a cost; additional effort is required in the data preparation for AM (a higher level of detail is necessary). Project C04 aims to simplify and streamline the necessary design and control processes and to interlink digital design (i.e. BIM) with automated fabrication. For this purpose, the Fabrication Information Modeling (FIM) methodology has been introduced. It acts as an intermediate layer between digital design and automated manufacturing, enabling automated detailing and Digital Twin methods utilizing a BIM-integratable data structure based on the Industry Foundation Classes (IFC), cf. Fig. 1.
Current state of research
As described in the previous section, FIM is designed to be an intermediate layer between design and manufacturing. In that sense, automated detailing and robot control methods have been implemented in previous studies. Lately, as illustrated in Fig. 1, the data structure has been extended and improved for better usability and versatility. FIM now also enables task planning methods for deeper integration into the manufacturing process. Currently, Project C04 aims to develop the FIM methodology further, increasing integration in both design and manufacturing and turning FIM into a Cyber-Physical System (CPS). With FIM, a circular data flow during manufacturing will be enabled, allowing feedback control and full data access at any stage of the manufacturing process. The underlying data structure allows the storage of any information related to the design, manufacturing, and performance of a component. Fig. 2 illustrates the methods that have already been implemented to contribute to the FIM-based cyber-physical system.
C04 has developed a BIM-based path-planning tool that generates robot tool paths utilizing a pattern-based algorithm (Fig. 2, left). The data is then exported to the FIM model (either an IFC file or an online graph database), which can then be utilized for simulation and manufacturing (Fig. 2, top). In manufacturing, the FIM data can be discretized into robot poses using the generated path and speed profile, and at the same time, sensor data can be fed back to the FIM model. For this purpose, different sensor systems have been implemented into the FIM framework. Fig. 2, bottom, illustrates the generated feedback utilizing a laser profiler during the manufacturing process.
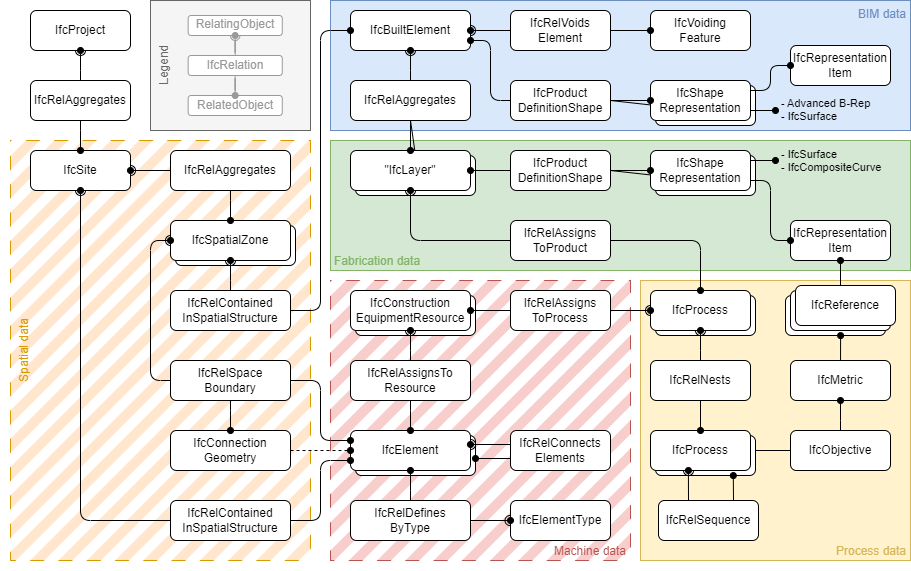
Fig. 1 IFC-based data structure utilized in FIM (Slepicka and Borrmann, 2024).
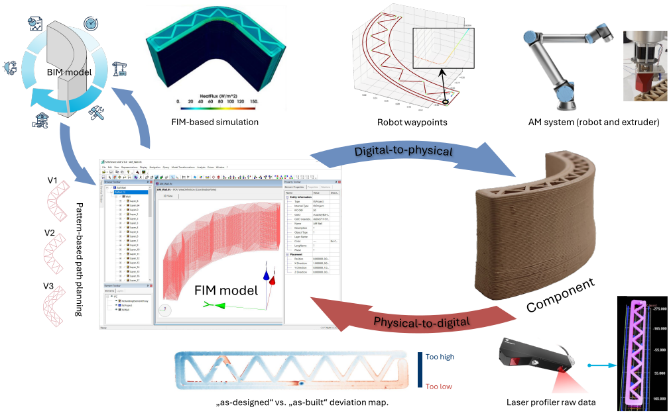
Fig. 2 Implemented parts of the FIM-based Cyber-Physical System (CPS) (Slepicka and Borrmann, 2024).



