Research Summary Report C04
Integrating Digital Design and Additive Manufacturing through BIM-Based Decision Support and Digital Twin Methods
[05.07.2022]
Borrmann, André, Project leader, andre.borrmann@tum.de,
Technical University of Munich, Chair of Computational Modeling and Simulation;
Slepicka, Martin, Researcher, martin.slepicka@tum.de,
Technical University of Munich, Chair of Computational Modeling and Simulation;
Computer Aided Manufacturing (CAM) methods, such as Additive Manufacturing (AM), are becoming increasingly popular in the construction industry, since they offer more geometrical freedom than conventional methods. However, more complex data preparation is required for these methods and thus they have been considered separately from digital design so far. To increase the usefulness of AM for the industry, this project aims to integrate AM methods into the digital design methodology BIM. To achieve this, a framework is being implemented that acts as an intermediate layer between design and fabrication and includes methods to derive simulation models and to store and evaluate digital twin data (see Fig. 1).
Summary
FIM enables seamless integration of AM into the BIM workflow by providing tools for two-way translation of geometric and semantic information (BIM) and manufacturing information (FIM). When translating to FIM, all manufacturing information is stored in the BIM exchange data format IFC, exposing all intermediate steps, such as slicing and path planning. In the implemented data structure, the information is stored in a production-conscious manner, corresponding to the individual production steps required.
The FIM data will be stored as generally and efficiently as possible, so that interpretation of the data will be possible for different AM systems, much like the PDF format can be processed by different printers. In addition, the FIM data can be used by other translation tools for all processes involved in manufacturing, such as performance simulations or robot control (see Fig. 2).
Current state of research
Currently, the FIM can be exported as IFC (see Fig. 3) and the corresponding data translated into robot control code (offline control) (see Fig. 2), online control is also possible and currently being implemented. In addition, a translation tool from FIM to simulation models was developed and tested in cooperation with subproject C01.
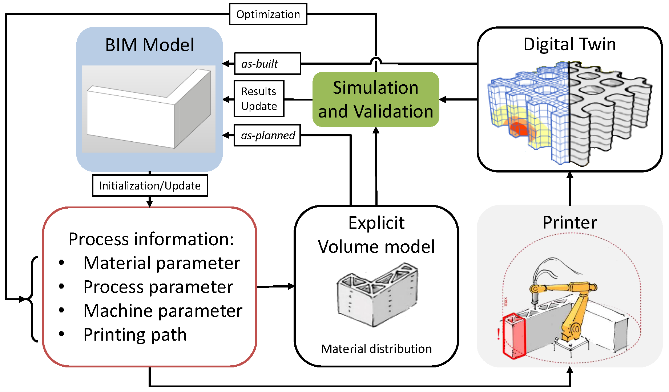
Fig. 1: FIM, connecting digital design and fabrication as an intermediate layer via automated detailing and digital twinning methods.
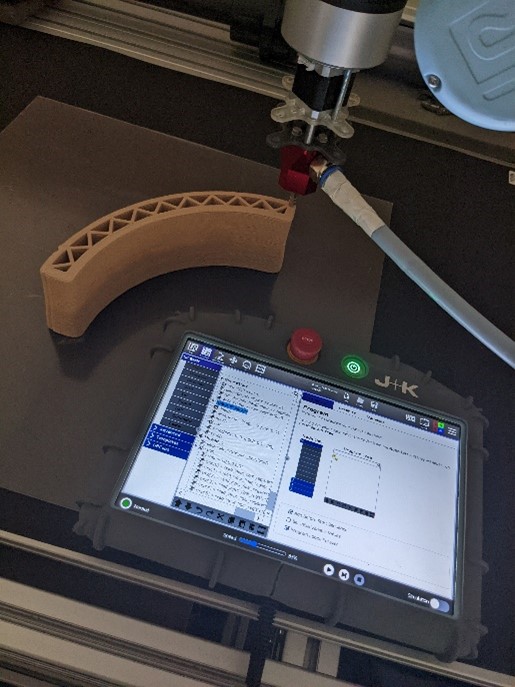
Fig. 2: Construction in model size with FIM by means of the automatically generated robot control code.
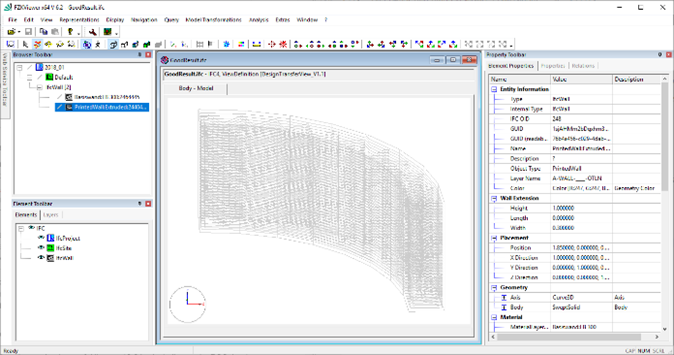
Fig. 3: IFC representation of the FIM data.



